Ville Kankare  ,
Ville Luoma,
Ninni Saarinen,
Jussi Peuhkurinen,
Markus Holopainen,
Mikko Vastaranta
,
Ville Luoma,
Ninni Saarinen,
Jussi Peuhkurinen,
Markus Holopainen,
Mikko Vastaranta
Assessing feasibility of the forest trafficability map for avoiding rutting – a case study
Kankare V., Luoma V., Saarinen N., Peuhkurinen J., Holopainen M., Vastaranta M. (2019). Assessing feasibility of the forest trafficability map for avoiding rutting – a case study. Silva Fennica vol. 53 no. 3 article id 10197. https://doi.org/10.14214/sf.10197
Highlights
- A static trafficability map was developed to provide information about suitable harvesting season
- The majority (91.7%) of the evaluated thinning stands were harvested without causing rutting damage if operations were timed correctly in relation to the static trafficability map information
- The static trafficability map provides reliable and slightly conservative estimation of the forest trafficability for supporting forest operations.
Abstract
Information on forest trafficability (i.e. carrying capacity of the forest floor) is required before harvesting operations in Southern Boreal forest conditions. It describes the seasons when harvesting operations may take place without causing substantial damage to the forest soil using standard logging machinery. The available trafficability information have been based on subjective observations made during the wood procurement planning. For supporting forest operations, an open access map product has been developed to provide information on trafficability of forests. The forest stands are distributed into classes that characterize different harvesting seasons based on topographic wetness index, amount of vegetation, ground water height and ditch depth. The main goal of this case study was to evaluate the information of the static forest trafficability map in relation to the detected rutting within logging tracks measured in the field. The analysis concentrated on thinning stands since the effect of rutting is significant on the growth of the remaining trees. The results showed that the static trafficability map provided reliable and slightly conservative estimation of the forest trafficability. The majority (91.7%) of the evaluated stands were harvested without causing significant damage if harvesting was timed correctly compared to the trafficability information. However, it should be pointed out that the weather history at small scale, the skills of a driver, and effects of used machinery are not considered in the map product although they can have a considerable impact on the rutting.
Keywords
remote sensing;
open data;
preharvest information;
stand trafficability
-
Kankare,
School of Forest Sciences, University of Eastern Finland, P.O. Box 111, Joensuu FI-80101, Finland; Department of Forest Sciences, University of Helsinki, FI-00014 University of Helsinki, Finland
 https://orcid.org/0000-0001-6038-1579
E-mail
ville.kankare@uef.fi
https://orcid.org/0000-0001-6038-1579
E-mail
ville.kankare@uef.fi
- Luoma, Department of Forest Sciences, University of Helsinki, FI-00014 University of Helsinki, Finland E-mail ville.luoma@helsinki.fi
- Saarinen, Department of Forest Sciences, University of Helsinki, FI-00014 University of Helsinki, Finland; School of Forest Sciences, University of Eastern Finland, P.O. Box 111, Joensuu FI-80101, Finland E-mail ninni.saarinen@helsinki.fi
- Peuhkurinen, Arbonaut Oy, Malminkaari 13–19, FI-00700 Helsinki, Finland E-mail jussi.peuhkurinen@arbonaut.com
- Holopainen, Department of Forest Sciences, University of Helsinki, FI-00014 University of Helsinki, Finland E-mail markus.holopainen@helsinki.fi
- Vastaranta, School of Forest Sciences, University of Eastern Finland, P.O. Box 111, Joensuu FI-80101, Finland E-mail mikko.vastaranta@uef.fi
Received 13 May 2019 Accepted 3 September 2019 Published 8 October 2019
Views 47566
Available at https://doi.org/10.14214/sf.10197 | Download PDF

1 Introduction
The term terrain trafficability means the ability of terrain to support the passage of vehicles (International Society for Terrain-Vehicle Systems Standardization Committee 1977). As most of the industrial wood is procured using powerful, heavy forest logging and transport machinery (Nordfjell et al. 2010), it is crucial to have knowledge on terrain trafficability. Terrain trafficability varies spatially and temporally (Suvinen 2006; Uusitalo and Ala-Ilomäki 2013; Uusitalo et al. 2015; Niemi et al. 2017). Constant factors affecting to the terrain trafficability are soil type, topography, and the depth of organic matter (e.g. peat). Other more varying factors include soil moisture, depth of ground frost and snow, growing stock and groundwater depth, the amount of harvest residues, and the distance covered by forwarders in close transport of timber (Uusitalo and Ala-Ilomäki 2013; Uusitalo et al. 2015). More details and comprehensive review on the factors affecting terrain trafficability can be found in Gambi et al. (2015) and Rab et al. (2015). In boreal forests, seasonal variation in soil moisture is high and wet conditions interrupt most logging and wood transport operations especially on peatlands and fine-grained mineral soils during the frost heave and rainy seasons, which is uneconomical for forest entrepreneurs, because their machinery is underutilized. Limited terrain trafficability of forest soil and forest road conditions are the two main reasons causing delays and decreased work efficiency for harvesting and transport contractors (Niemi et al. 2017). In addition, low carrying capacity can lead to rutting, and depending on the degree of the rutting (i.e., depth and length), can cause disturbances on water management as well as various levels of quality and growth losses of trees due to damage on tree roots (Uusitalo and Ala-Ilomäki 2013; Uusitalo et al. 2015; Niemi et al. 2017).
Previously, terrain trafficability information has depended on the quality and timeliness of a forest management plan and observations made in the field by a company representative. Forest management plans provide information on site type, soil type, ditching and growing stock that have been further used in subjective assessment of terrain trafficability. However, more comprehensive and spatially continuous information on terrain trafficability would enable more cost-effective harvesting stand allocation for different seasons and better forwarding route planning for harvesting stands (Suvinen 2006). Digital elevation models (DEMs) of varying resolution have been used to calculate topographic wetness index (TWI) and estimate areas of high terrain moisture and therefore higher risk of rutting damage (e.g. Murphy et al. 2011; Talbot et al. 2017). Thus, for the small-scale forestry point-of-view, the challenge has been the low resolution of available data. For example, in Nordic countries, campaigns to collect nationwide airborne laser scanning (ALS) data have been conducted already over ten years and similar dataset are becoming increasingly available in many other countries worldwide. The use of ALS for collecting operational forest resource information has opened new possibilities also for assessing terrain trafficability through a high resolution (2 m pixel size) DEM that can be derived from the data and used further to calculate topographic wetness indices (e.g. Niemi et al. 2017). In addition, using ALS data, forest height and density can be characterized (White et al. 2013) as well as ditches and their condition can be detected. Overview of the applicability of remote sensing to improve forest operations is presented in Talbot et al. (2017).
Using openly available ALS data and National Land Survay of Finland’s (NLS’s) topographic database a forest trafficability map was developed (hereafter referred as to the static trafficability map; more details in method section) for supporting wood procurement planning. The static trafficability map describes the season when the harvesting operations may take place without causing significant damage to soil using standard logging machinery (harvester, forwarder). However, feasibility of the static trafficability map for stand allocation for different seasons and to avoid rutting has not been investigated. Therefore, the main goal of this case study was to evaluate the information provided by the static trafficability map in relation to the damage within the logging tracks measured in the field. Thinning stands were selected to be the focus of the analysis since the effect of possible harvest damage can be significant on the growth of remaining trees.
2 Material and methods
2.1 Static trafficability map
A static trafficability map provides information about the season when harvesting operations may take place with standard logging machinery (i.e. a harvester and a forwarder) without causing substantial damage to the forest soil. The map covers currently 59 forest inventory areas which is approximately 60% of Finland (Finnish Forest Center 2018). The map area is divided into 16 m ×16 m grid cells compatible with the forest resource information provided by the Finnish Forest Center and each grid cell is classified into the following eight classes:
1. Operations possible in any season
2. Operations possible in summer, mineral soils
3. Operations possible in summer during dry season, mineral soils
4. Operations possible in summer, peatlands
5. Operations possible in summer during dry season, peatlands
6. Operations possible only during frost or thick layer of snow
7. Waters
8. No data (ALS data missing)
The classification (more details in Efforte 2017) is based on interpretation of ALS data and NLS’s topographic database that are freely available through their data services. The starting point of the estimations of the static trafficability class was based on interpretation of the classic TWI calculated from ALS data derived digital terrain model (DTM), for which the threshold values were estimated with logistic regression technique from field measured reference data. Using the NLS’s topographic database, mineral soils, peatlands as well as the location of ditches and water bodies were extracted. Location information of ditches with ALS data were further used to estimate average value of ditch depth or ground water height. Then the estimated base level was adjusted in mineral soils depending on the amount of vegetation and in peatlands ditch depth, and groundwater height was considered in addition to the amount of vegetation. For example, greater amount of vegetation, higher ditch depth, and lower ground water height increased the trafficability. The map has been developed by Arbonaut Oy and is freely distributed through Finnish Forest Center’s data services (Finnish Forest Center 2018).
To simplify the analysis, classes 2 and 4 and 3 and 5 were combined due to their similarity in timing of operations. Therefore, the following four classes were analyzed: (1) Operations possible in any season, (2) operations possible in summer, (3) operations possible in summer during dry season and (4) operations possible during frost or thick layer of snow.
2.2 Study areas, field measurements and weather data
Field data were acquired in September–October 2016 from 67 forest stands in three study sites in southern Finland near Päijänne lake (Fig. 1) where forest operations (i.e. thinnings) had been carried out between August 1, 2015 and July 31, 2016. Forest operations were conducted, using a single grip harvester and forwarder, based on the best practices for sustainable forest management (Äijälä et al. 2019). Typical harvester track pattern is to cover the stand with approximately 20-meter track pacing due to the typical harvester reach varying from 8–11 meters. The goal of the field data acquisition was to cover all the different static trafficability map classes and months during the above-mentioned period creating a full year cycle. Within the 67 stands, 225 30-meter-long logging tracks were measured and evaluated for possible damage. The number of tracks within each stand varied from 1 to 8 depending on the stand trafficability class and timing (month) of the harvest. All evaluated logging tracks were placed for each stand in a way that the static trafficability map class remained constant (Fig. 1). From every logging track, the total length of 1 meter or longer rutting with depth of 10 cm or over at mineral soils and 20 cm or over at peatlands were recorded. Depth of a rut was measured from ground level using a measurement stick.
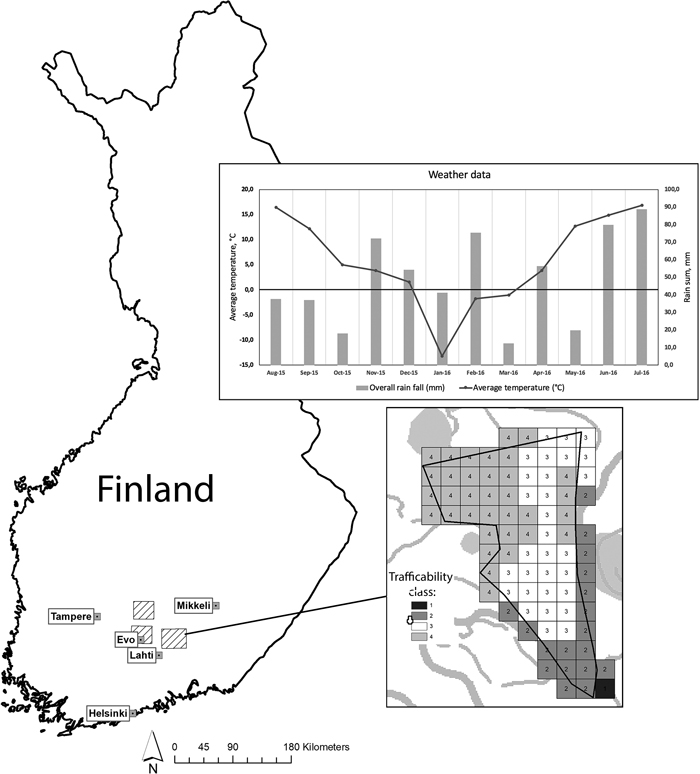
Fig. 1. Three study areas (shown in the map with striped rectangle) were located in southern Finland near Päijänne lake. Weather data, shown at top right corner, shows the monthly average temperature (°C) (values at y-axis) with line graph and rain sum (mm) (values at z-axis) with bar graph. Static trafficability map, shown in bottom right corner, is divided into 16 m × 16 m grid cells compatible with the forest resource information and each cell is classified into the following four classes (i.e. seasons): (1) Operations possible in any season, (2) Operations possible in summer, (3) Operations possible in summer during dry season, (4) Operations possible only during frost or thick layer of snow. View larger in new window/tab.
The Finnish Meteorological Institute (FMI) has a network of approximately 400 observation stations located around Finland that record weather and air quality data, for example. The data are freely available from the FMIs data services and for the current study the following information was downloaded covering the time period when forest operations were carried out: monthly average temperature (°C), overall rain fall (mm), and time period of solid snow cover (Fig. 1). Weather data were downloaded from six (6) stations closest to the studied stands, namely Evo, Hämeenlinna, Heinola, Asikkala, Sysmä, and Luhanka. Time period of solid snow cover was between January 1, 2016 and April 6, 2016.
2.3 Evaluation
The information provided by the static trafficability map was evaluated through analyzing characteristics of the rutting within the logging tracks measured in the field using basic statistical metrics describing the variation in damage depth and length at stand- and logging track level. Finnish forest legislation (Ministry of Agriculture and Forestry 1996) states that average length of the damaged portions of the logging tracks cannot exceed 20% on mineral soils or 25% on peatlands of the total length of the logging tracks. Thus, logging track was identified as damaged if the damage exceeded the thresholds set by the legislation. Legislation states that track is seen as damaged if there is over 1-meter long rutting with higher depth than 10 cm in mineral soils and 20 cm in peatlands.
To further analyze the rutting damage in correspondence to the static trafficability map, the weather data were used to characterize the four different static trafficability classes and variability of the rutting damage were calculated when (1) the timing of the harvest matched the season suggested by static trafficability map class, and (2) the timing of the harvest was of the season suggested by the static trafficability map class. Seasons were distinguished based on the average monthly weather data and the months were signed to the corresponding static trafficability map class with following rules:
Static trafficability map class 1: Operation possible at any season.
Static trafficability map class 2: Operations possible in summer i.e. on months with higher average temperature than 5 °C or during frost or solid snow cover.
Static trafficability map class 3: Operations possible in summer during dry season i.e. on summer months with higher average temperature than 5 °C and rainfall less than 30 mm or during frost or solid snow cover.
Static trafficability map class 4: Operations possible only during frost or thick layer of snow.
3 Results
The majority (91.7%) of the 67 evaluated thinning stands were harvested without causing rutting damage larger than the forest legislation limits (Fig. 2) when the timing of the operations matched with the static trafficability map class. In the thinning stands that were classified to the classes one and two (i.e. operations possible in any or summer season) in the static trafficability map, rutting damage were not observed but in classes 3 and 4 (i.e. operations possible in dry summer or winter), that are significantly more difficult to operate, rutting damage were observed in 25.0% and 33.3% of the stands, respectively. If the operations were timed incorrectly, damage exceeding the Finnish legislation limits were recorded only in 8.7% of the stands overall. Further evaluating stand-level damage severity (i.e. the relative length of track that is seen as damaged) in the following classes (1) undamaged, 0%, (2) less than 10%, (3) between 10% to 20% and (4) more than 20% revealed that incorrect timing of forest operations caused more minor (i.e. not exceeding the Finnish legislation limits) damage (Table 1). Minor damage (damage severity <10% and 10%–20%) were detected 16.7% in correctly times forest operations compared to 45.2% with incorrectly timed.
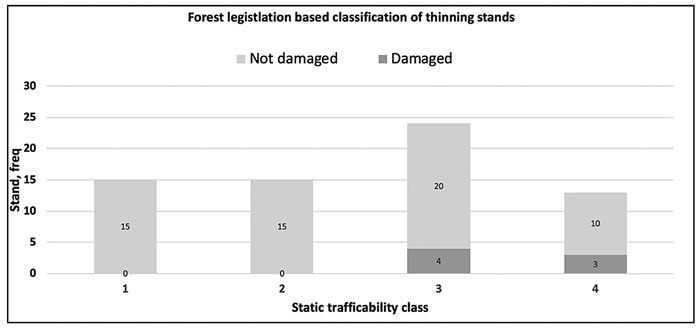
Fig. 2. The stand-level (i.e. average values) frequency distribution of the stand’s classification to “Not damaged” or “Damaged” based on the measured damage on logging tracks assessed using the Finnish forest legislation limits. Static trafficability classes at x-axis: (1) Operations possible in any season, (2) Operations possible in summer, (3) operations possible in summer during dry season and (4) operations possible only during frost or thick layer of snow.
| Table 1. The rutting damage severity (%) at stand-level in following classes: 0% i.e. undamaged, <10%, 10%–20% and >20%. Damage severity describes the relative length of track that is seen as damaged in above mentioned four classes. Track is damaged if there is over 1-meter long rutting with higher depth than 10 cm in mineral soils and 20 cm in peatlands. | ||||||||
| Damage severity | Correct timing | Incorrect timing | ||||||
| 0% | <10% | 10%–20% | >20% | 0% | <10% | 10%–20% | >20% | |
| Stands, n | 25 | 3 | 3 | 5 | 12 | 9 | 5 | 5 |
| % | 69.4 | 8.3 | 8.3 | 13.9 | 38.7 | 29.0 | 16.1 | 16.1 |
To evaluate further the seasonal characteristics of the rutting damage, logging track level variability of the damage was calculated when the timing of the harvest either matched with or differed from the trafficability season based on the static trafficability map classes. Analysis showed that if operations were timed correctly compared to the static trafficability maps class, damage exceeding the Finnish forest legislation limits were observed overall in 16.2% of the measured logging tracks. The magnitude of the rutting on logging tracks varied in depth and length with an average of 28.1 cm and 9.8 m, respectively. Overall, the length of the damaged portions of the logging tracks that were damaged varied from 3% (1 m) up to 100% (30 m) with 32.6% on average. The maximum depth of the damaged logging tracks was on average 40.6 cm (minimum of 15.0 cm and maximum of 80.0 cm). If stands were harvested during a correct season, rutting damage at logging track level that exceeded the Finnish legislation limits were not-recorded only in stands were operations were possible in summer season (i.e. class 2)(Table 2). Rutting damage were recorded in all trafficability classes if the timing of the harvesting was not in line with the information from the static trafficability map. Consequently, most damage were recorded in logging tracks in stand were operations were possible during frost or thick layer of snow based on the static trafficability map (i.e. class 4).
| Table 2. Percentage of “not damaged” and “damaged” logging tracks in relation to Finnish legislation limits (Ministry of Agriculture and Forestry 1996) when the timing of the harvest either matched with or differed from the static trafficability map class. Track count (n) is shown in parenthesis. Static trafficability classes were: (1) Operations possible in any season, (2) Operations possible in summer, (3) operations possible in summer during dry season and (4) operations possible only during frost or thick layer of snow. | ||||
| Static trafficability class | Correct timing | Incorrect timing | ||
| Not damaged, % (n) | Damaged, % (n) | Not damaged, % (n) | Damaged, % (n) | |
| 1 | 94.2 (49) | 5.8 (3) | - | - |
| 2 | 100.0 (34) | 0.0 (0) | 94.7 (18) | 5.3 (1) |
| 3 | 67.7 (21) | 32.3 (10) | 87.1 (27) | 12.9 (4) |
| 4 | 38.5 (5) | 61.5 (8) | 78.8 (26) | 21.2 (7) |
4 Discussion
Forest trafficability information is crucial for wood procurement planning, because it describes the season when harvesting operations may take place without causing significant damage to soil using standard logging machinery. Improved knowledge of terrain trafficability would enable more cost-effective harvesting stand allocation for different seasons and better forwarding route planning for harvesting stands (Suvinen 2006). The main goal of this study was to evaluate the information provided by the freely available static trafficability map in relation to the characteristics of rutting damage within the logging tracks recorded in the field. The production of static trafficability map relies on the availability of open access dataset which are increasingly available worldwide. In addition, the demand on diverse preharvest information has increased especially in the countries that practice small-scale and intensive forest management and growth harvests (i.e. thinnings). The results showed that the static trafficability map provides reliable estimation of the forest trafficability in relation to the rutting damage measured in the field. If harvesting was timed correctly compared to the trafficability information, rutting damage were recorded only in the stands were operations were possible during dry summer, frost or thick layer of snow (i.e. static trafficability classes 3 and 4). Results also suggested that the winter season of 2015–2016 was particularly difficult for harvesting as only 2/3rds of the stands harvested then were without rutting damage. Thus, is should be noted that the measured number of tracks within each stand varied which could have an impact on the analysis. In addition, there is no industry standard on how to define stands overall trafficability class due to lack of grid-level stand trafficability class information previously. Results suggested that the trafficability estimation is slightly conservative (i.e. classifies pixels into lower class) because 91.3% of the stands were harvested without rutting damage that exceeded the legislation limits although harvesting was performed outside the correct season based on static trafficability map class. Evaluating the damage severity (Table 1) showed that minor damage (i.e. not exceeding the Finnish legislation limits) was recorded in 45.2% of the stands if harvesting was timed incorrectly. In addition, the low number of measured tracks in the field during winter conditions (13 tracks from 3 stands) when harvest was timed correctly compared to 33 tracks from 10 stands measured with incorrect timing, can cause that single stand with extremely bad condition can have a much higher impact on the overall evaluation. It should be noted that the forest trafficability and the risk of causing rutting damage during harvest are highly dependent on the knowledge of local weather history (especially the amount of rain), the skill of a harvester driver (i.e. planning the logging tracks and utilization of harvesting residues over the tracks) and also the used machinery (surface pressure of a machine) from which all could not be included in to the analysis. In this study, the average weather history of the closest weather stations was considered but there can be a lot of variation in weather condition even within small areas. Therefore, to fully comprehend the factors affecting the rutting damage and the usability of stand trafficability map further research is required.
5 Conclusions
The objective of this study was to evaluate the information of the static trafficability map in relation to the rutting damage within logging tracks within thinning stands. The results showed that the static trafficability map provided reliable and slightly conservative estimation of the forest trafficability. The majority (91.7%) of the evaluated stands were harvested without causing significant damage when harvesting was timed correctly compared to the trafficability information. It should be noted that the risk of rutting damage is significantly affected by the local weather history, route planning, used machinery and the use of harvest residue to reinforce the tracks. Based on the analyses, it seems that static trafficability map can be used in harvesting stand allocation for different seasons and thus, support wood procurement planning but additional research is warranted to fully comprehend the effect of different variables affecting to the risk of rutting damage.
Acknowledgements
This study was initiated and financially supported by the Ministry of Agriculture and Forestry of Finland as a part of “Metsätieto ja sähköiset -palvelut” key project. Study was also supported by the Academy of Finland through the Centre of Excellence in Laser Scanning Research (project number 272195).
References
Äijälä O., Koistinen A., Sved J., Vanhatalo K., Väisänen P. (eds.) (2019) Metsänhoidon suositukset. Tapion julkaisuja. ISBN 978-952-5632-75-0.
Efforte (2017). Big data bases and applications: forest trafficability maps – data sources and methods. https://www.luke.fi/efforte/wp-content/uploads/sites/14/2017/09/EFFORTE-D3.3-Forest-trafficability-maps-data-sources-and-methods.pdf. [Cited 30 May 2018].
Finnish Forest Center (2018). Static trafficability maps. https://www.metsakeskus.fi/korjuukelpoisuuskartat. [Cited 30 May 2018].
Gambi M., Certini G., Neri F., Marchi E. (2015). The impact of heavy traffic on forest soils: a review. Forest ecology and management 338: 124–138. https://doi.org/10.1016/j.foreco.2014.11.022.
International Society for Terrain-Vehicle Systems Standardization Committee (1977). International society for terrain-vehicle system standards. Journal of Terramechanics 14(3): 153–182. https://doi.org/10.1016/0022-4898(77)90013-1.
Kalela E.K. (1949). Männiköiden ja kuusikoiden juurisuhteista I. Acta Forestalia Fennica 57.2. 78 p. https://doi.org/10.14214/aff.7398.
LUKE Forest statistics (2019). Natural resources institute Finland statistical services. https://stat.luke.fi/metsa. [Cited 10 Jan 2019].
Metsäteho Oy (2018). Tehokas puuhuolto 2025-visio. http://www.metsateho.fi/tehokas-puuhuolto-2025-visio/. [Cited 20 Nov 2018].
Ministry of Agriculture and Forestry (1996). Valtioneuvoston asetus metsien kestävästä hoidosta ja käytöstä. 1308/2013. Ministry of Agriculture and Forestry, Finland. https://www.finlex.fi/fi/laki/alkup/2013/20131308. [Cited 30 May 2018].
Murphy P.N., Ogilvie J., Meng F.-R., White B., Bhatti J.S., Arp P.A. (2011). Modelling and mapping topographic variations in forest soils at high resolution: a case study. Ecological Modelling 222(14): 2314–2332. https://doi.org/10.1016/j.ecolmodel.2011.01.003.
Niemi M.T., Vastaranta M., Vauhkonen J., Melkas T., Holopainen M. (2017). Airborne LiDAR-derived elevation data in terrain trafficability mapping. Scandinavian Journal of Forest Research 32(8): 762–773. https://doi.org/10.1080/02827581.2017.1296181.
Nordfjell T., Björheden R., Thor M., Wästerlund I. (2010). Changes in technical performance, mechanical availability and prices of machines used in forest operations in Sweden from 1985 to 2010. Scandinavian Journal of Forest Research 25(4): 382–389. http://dx.doi.org/10.1080/02827581.2010.498385.
Rab M.A, Bradshaw F.J., Campbell R.G., Murphy S. (2005). Review of factors affecting disturbance, compaction and trafficability of soils with particular reference to timber harvesting in the forests of south-west Western Australia, Consultants Report to Department of Conservation and Land Management, Western Australia, Sustainable Forest Management Series, SFM Technical Report No. 2. 146 p.
Suvinen A. (2006). A GIS-based simulation model for terrain tractability. Journal of Terramechanics 43(4): 427–449. https://doi.org/10.1016/j.jterra.2005.05.002.
Talbot B., Pierzchala M., Astrup R. (2017). Applications of remote and proximal sensing for improved precision in forest operations. Croatian Journal of Forest Engineering 38(2): 327–336.
Uusitalo J., Ala-Ilomäki J. (2013). The significance of above-ground biomass, moisture content and mechanical properties of peat layer on the bearing capacity of ditched pine bogs. Silva Fennica 47(3) article 993. https://doi.org/10.14214/sf.993.
Uusitalo J., Salomäki M., Ala-Ilomäki J. (2015). Variation of the factors affecting soil bearing capacity of ditched pine bogs in Southern Finland. Scandinavian Journal of Forest Research 30(5): 429–439. https://doi.org/10.1080/02827581.2015.1012110.
Vastaranta M., Yrttimaa T., Saarinen N., Yu X., Karjalainen M., Nurminen K., Karila K., Kankare V., Luoma V., Pyörälä J., Junttila S., Tanhuanpää T., Kaartinen H., Kukko A., Honkavaara E., Jaakkola A., Liang X., Wang Y., Vaaja M., Hyyppä H., Katoh M., Wulder M.A., Holopainen M., Hyyppä J. (2018). Airborne laser scanning outperforms the alternative 3D techniques in capturing variation in tree height and forest density in southern boreal forests. Baltic Forestry 24(2): 268–277.
White J.C. Wulder M.A., Varhola A., Vastaranta M., Coops N.C., Cook B.D., Pitt D., Woods M. (2013). A best practices guide for generating forest inventory attributes from airborne laser scanning data using an area-based approach. The Forestry Chronicle 89(6): 722–723. https://doi.org/10.5558/tfc2013-132.
Yu X., Hyyppä J., Karjalainen M., Nurminen K., Karila K., Vastaranta M., Kankare V., Kaartinen H., Holopainen M., Honkavaara E., Kukko A., Jaakkola A., Liang X., Wang Y., Hyyppä H., Katoh M. (2015). Comparison of laser and stereo optical, SAR and inSAR point clouds from air- and space-borne sources in the retrieval of forest inventory attributes. Remote Sensing 7: 15933–15954. https://doi.org/10.3390/rs71215809.
Total of 20 references.
Send to email
