Irving U. Hernández-Gómez,
Carlos R. Cerdán,
Angélica Navarro-Martínez,
Dinora Vázquez-Luna,
Samaria Armenta-Montero,
Edward A. Ellis 
Assessment of the CLASlite forest monitoring system in detecting disturbance from selective logging in the Selva Maya, Mexico
Hernández-Gómez I. U., Cerdán C. R., Navarro-Martínez A., Vázquez-Luna D., Armenta-Montero S., Ellis E. A. (2019). Assessment of the CLASlite forest monitoring system in detecting disturbance from selective logging in the Selva Maya, Mexico. Silva Fennica vol. 53 no. 1 article id 10012. https://doi.org/10.14214/sf.10012
Highlights
- The accuracy of CLASlite to detect forest disturbance from selective logging using Landsat imagery was very low (<19.1%)
- Selective logging impacts was only detected in one case with the highest logging intensity (7 m3 ha–1)
- CLASlite shows potential in monitoring forest disturbance from tree biomass impacts greater than 900 m2.
Abstract
Detecting and monitoring forest disturbance from selective logging is necessary to develop effective strategies and polices that conserve tropical forests and mitigate climate change. We assessed the potential of using the remote sensing tool, CLASlite forest monitoring system, to detect disturbance from timber harvesting in four community forests (ejidos) of the Selva Maya on the Yucatan Peninsula, Mexico. Selective logging impacts (e.g. felling gaps, skid trails, logging roads and log landings) were mapped using GPS in the 2014 annual cutting areas (ACAs) of each ejido. We processed and analyzed two pre-harvest Landsat images (2001 and 2013) and one post-harvest image (November 2014) with the CLASlite system, producing maps of degraded, deforested and unlogged areas in each ACA. Based on reference points of disturbed (felling and skidding), deforested (log landings and roads) and unlogged areas in each ACA, we applied accuracy assessments which showed very low overall accuracies (<19.1%). Selective logging impacts, mainly from log landings and new logging road construction, were detected in only one ejido which had the highest logging intensity (7 m3 ha–1).
Keywords
community forestry;
forest degradation;
tropical forest;
Yucatan Peninsula
- Hernández-Gómez, Facultad de Ciencias Agrícolas, Universidad Veracruzana. Circuito Gonzalo Aguirre Beltrán, Isleta, Xalapa, Veracruz. C.P. 91000, Mexico E-mail urielxal@gmail.com
- Cerdán, Facultad de Ciencias Agrícolas, Universidad Veracruzana. Circuito Gonzalo Aguirre Beltrán, Isleta, Xalapa, Veracruz. C.P. 91000, Mexico E-mail ccerdan@uv.mx
- Navarro-Martínez, El Colegio de la Frontera Sur Av. Centenario km 5.5, Col. Pacto Obrero Campesino s/n. Chetumal, Quintana Roo. C.P. 77014, Mexico E-mail manavaster@gmail.com
- Vázquez-Luna, Facultad de Ingeniería en Sistemas de Producción Agropecuaria, Universidad Veracruzana. Carretera Costera del Golfo Km. 220, C. Agrícola y Ganadera Michapan, Acayucan, Veracruz. C.P. 96000, Mexico E-mail divazquez@uv.mx
- Armenta-Montero, Centro de Investigaciones Tropicales (CITRO), Universidad Veracruzana. Morelos No. 44 y 46, Zona Centro, Xalapa, Veracruz. C.P. 91000, Mexico E-mail samaria.am@gmail.com
-
Ellis,
Centro de Investigaciones Tropicales (CITRO), Universidad Veracruzana. Morelos No. 44 y 46, Zona Centro, Xalapa, Veracruz. C.P. 91000, Mexico
E-mail
eellis@uv.mx
Received 7 June 2018 Accepted 22 February 2019 Published 26 February 2019
Views 77700
Available at https://doi.org/10.14214/sf.10012 | Download PDF

1 Introduction
Tropical forests are a major global carbon stock and play a key role in climate change mitigation (Putz et al. 2008). However, their extension is being reduced by deforestation, and degradation processes are also impacting these ecosystems, resulting in greater carbon emissions (69%) than from forest cover loss (Baccini et al. 2017). Forest degradation is defined as the reduction in the capacity of the forest to provide products and environmental services due to changes in biomass, structure and composition without implying a change in land cover; it is caused by anthropogenic activities such as selective logging, firewood collection, fire and grazing (Griscom et al. 2009; Sasaki and Putz 2009; Simula and Mansur 2011). In Latin America, selective logging implies the removal of high-value timber from the forest usually present in low densities (1 to 20 trees per hectare: Putz et al. 2008) and is identified as the main cause of forest degradation (Pearson et al. 2017). Thus, detecting and monitoring potential degradation from timber harvesting is vital to developing effective strategies that conserve tropical forests and mitigate climate change (Asner 2009; Asner et al. 2010; Asner 2014; Reimer et al. 2015).
Unfortunately, forest degradation is not as easy to detect and monitor in comparison to deforestation; it is costlier and more complex using remote sensing techniques, and results can often be subjective due to succession dynamics and assumed baselines for non-degraded forest (Putz and Redford 2010; Thompson et al. 2013). Efforts have been pursued to detect and measure anthropogenic and natural forest disturbances applying remote sensing of satellite imagery in order to develop viable methods of monitoring the phenomenon of degradation in the tropics (Asner 2009; Griscom et al. 2009; Thompson et al. 2013). Landsat images have been successfully applied to detect forest disturbance from selective logging in the tropics (Broadbent et al. 2006; Zu et al. 2012; Anwar and Stein 2012; Tritsch et al. 2016), providing a potentially valuable image source for tropical forest managers and conservation practitioners.
The objective of this study is to evaluate the Carnegie Landsat Analysis System-lite (CLASlite), a software package developed to identify deforestation and forest degradation from satellite imagery, especially Landsat. CLASlite is a semi-automated system that integrates remote sensing research and algorithms into a user-friendly environment, providing a tool that natural resource managers, governments institutions and conservation organizations can use for forest monitoring and environmental planning (http://claslite.ciw.edu). Although CLASlite has been applied to detect deforestation and forest degradation from logging and other anthropogenic activities in the tropics (Asner et al. 2010; Allnutt et al. 2013; Bryan et al. 2013; Chicas et al. 2016), its effectiveness in detecting disturbances and monitoring potential degradation from selective logging in Mexico has not been evaluated. We tested the accuracy of the automated and user-friendly CLASlite system to detect and monitor selective logging disturbances in the Selva Maya, Mexico as a potential tool for local forest managers and conservation practitioners with limited or no remote sensing experience.
2 Materials and methods
2.1 Study area and mapping
We assessed the capability of CLASlite in detecting forest disturbance from selective logging in four community forestry ejidos (Caobas, Felipe Carrillo Puerto, Noh-Bec and Petcacab) located in the state of Quintana Roo, southeast Mexico (Fig. 1). The ejidos are situated in flat karst topography and at low elevations (10 to 150 m a.s.l.). Climate in the region is hot and sub-humid with an annual average precipitation of 1200 mm, with a marked dry season (<60 mm a month) from November to April (Gutiérrez-Granados et al. 2011). The predominant upland forests in the region are between 15 and 25 m in height and are semi-deciduous, loosing around 25 to 50% of its foliage during the dry season (Flores and Espejel 2004; Ellis and Porter-Bolland 2008).
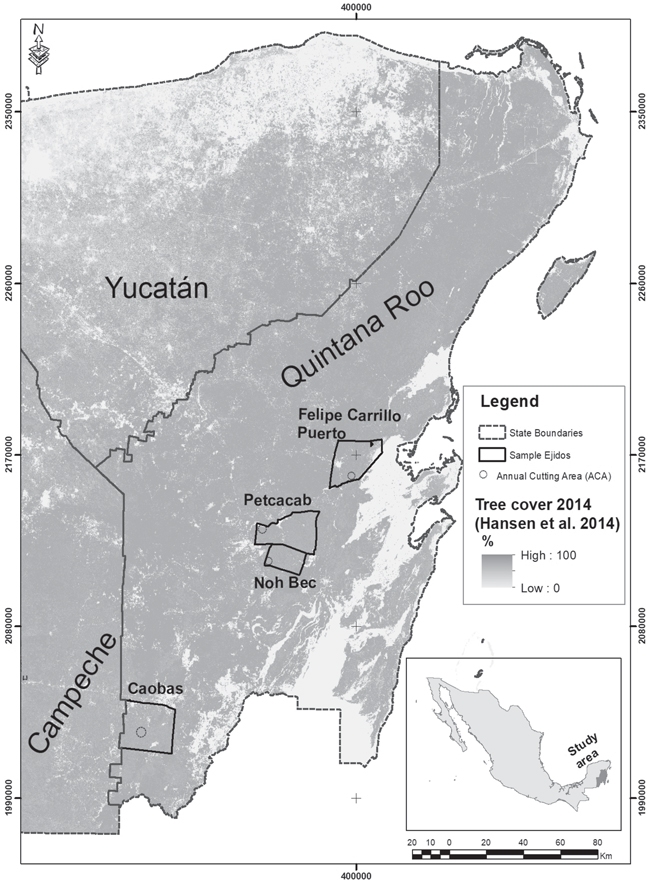
Fig. 1. Location of study area and sampled forestry ejidos in Quintana Roo, Mexico.
The study ejidos are all involved with selective logging for commercial purposes and apply a polycyclic silvicultural system with a 25-year cutting cycle guided by a required forest management plan (FMP) (Ellis et al. 2015, 2017). Forest management is conducted within annual cutting areas (ACAs) planned out in the FMP. Each ACA can range from 200 to 1000 ha, depending on the size and scale of the forest management operation. Harvestable trees are previously marked by logging crews and then felled by chainsaw and extracted (skidded) using an articulated forestry tractor (skidder), or in the case of Caobas, a modified agricultural tractor. Skidded logs are deposited in log-landings, which are accessed by logging roads to transport timber to neighboring sawmills or markets.
Mapping was conducted in the 2014 ACAs from March to November 2015 after logging activities were concluded. Delimited ACAs and sub-blocks were georeferenced from maps in FMPs or from shapefiles provided by forest technicians. Two 100 ha sub-blocks were randomly selected for field sampling and were mapped during fieldwork using Garmin GPS Map 60csx. In each sub-block, all felled trees (stumps) or felling gaps, skid trails, log landings, and logging roads were georeferenced.
2.2 CLASlite analysis
Landsat scenes (path 19, row 47) were selected and downloaded in GEOTIFF format from the United States Geological Survey (USGS) Earth Explorer website (https://earthexplorer.usgs.gov). We used Landsat images due to their free and easy access, keeping in mind that CLASlite could be applied by local forest managers and conservation NGOs with limited budgets and remote sensing capacities. We selected two pre-harvest scenes, a Landsat 7 ETM with minimal cloud cover (<10%) from March 2001 (dry season) and a Landsat 8 OLI with under 20% cloud cover from July 2013 (wet season), and one post-harvest scene, a Landsat 8 OLI from November 2014 (dry season). Very few Landsat 8 OLI scenes with less than 20% cloud cover were available, indicating the difficulty in obtaining quality images of the study area. Nevertheless, CLASlite has been reported as being effective in removing cloud cover and other atmospheric artefacts common in the humid tropics (Reimer et al. 2015).
Forest change detection of deforested and degraded areas was conducted between the pre and post-harvest input imagery using CLASlite 3.3. The CLASlite system automatically performs radiometric and atmospheric correction and produces fractional cover maps of photosynthetic vegetation (PV), non-photosynthetic vegetation (NPV) and bare soil (S) from an available library of spectral signatures and applying Automated Monte Carlo Unmixing algorithm (AutoMCU), also known as Spectral Mixture Analysis (Asner et al. 2005; Asner 2009; Romero-Sanchez and Ponce-Hernandez 2017). CLASlite combines fractional cover maps of both dates to produce results of deforested, degraded and areas with unchanged forest cover. For detection of forest loss (deforestation) and degradation (areas of persistent forest disturbance), CLASlite applies expressions derived from extensive field testing and validation (Asner et al. 2005; Asner et al. 2009). For example, in their default settings, forested pixels have a PV ≥ 80%, deforested pixels are those where PV decreases to 60% or less, S increases 15% or more and NPV increases to 20% or more, while degraded pixels represent those where PV decreased from 80%, but remain greater than 60%, S increases 15% or more and NPV increases by 20% or more.
2.3 Accuracy assessment
Based on validation points obtained during field mapping of ACAs, we conducted accuracy assessments of the classification outputs produced by CLASlite 3.3: 1) undisturbed forest cover, 2) deforested and 3) disturbed or degraded forest areas. The validation points extracted and used for accuracy assessments included: 1) 100 felling gap points randomly selected from all georeferenced gaps (stumps) using a random number generator; 2) 25 skid trail points located in randomly selected trails and at random distances from each skid trail entrance, 3) 25 logging road points taken every 500 m on the road during the ACA mapping process, 4) the center point of all log landings mapped in each ACAs (2 to 9) and 5) 25 randomly selected un-logged points taken during field mapping at a random direction and distance (between 50 to 80 m) from each skid trail validation point. We then combined our reference points of felling and skidding into a single “disturbance” class and log landings and logging roads into a single “deforestation” class based on their type of impact on the forest biomass (i.e. damage to forest biomass and small canopy gaps or complete removal of trees and large canopy openings).
For accuracy assessment we applied the method described by Olofsson et al. (2013, 2014) using the accurAssess tool for QGIS described and available from Mas et al. (2014). The adjusted confusion matrices and producer accuracies were used to determine the accuracy of CLASlite in classifying disturbance, deforestation and unlogged forest in the four annual cutting areas sampled. Confusion matrices generated by the Olofsson method are adjusted to weigh the number of reference points and proportions of each category on the map (Olofsson et al. 2013, 2014; Mas et al. 2014).
3 Results
Fig. 2 shows the post-harvest image (2014), pre (2001) and post-harvest (2014) fractional cover maps and CLASlite deforestation and disturbance results for the four ejido ACAs, also indicating validation points of disturbance and deforestation impacts used for accuracy assessments. The ejidos we sampled contain among the largest ACAs (>800 ha) of the community forestry ejidos in the region, and Noh Bec and Petcacab are among the most intensively harvested; yet, there were no indications that even in these larger forest management operations CLASlite could accurately detect selective logging impacts on forest biomass. Even the most discernable harvest impacts, logging roads and log landings, were not sufficiently detected by CLASlite.
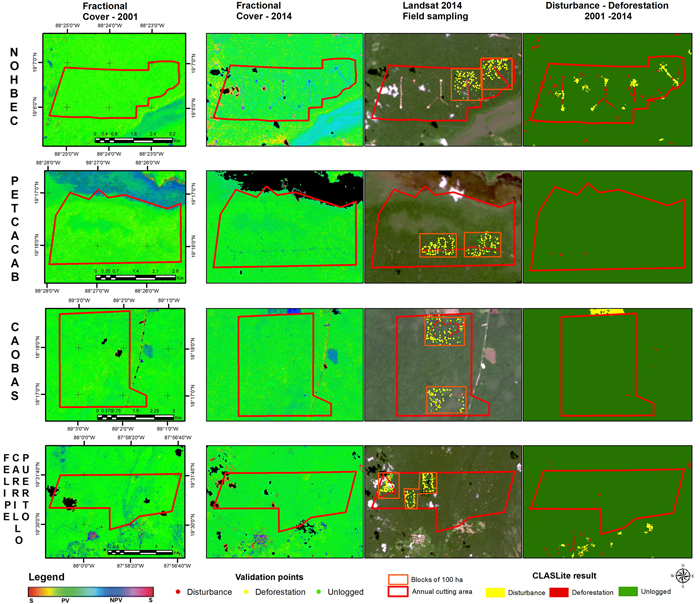
Fig. 2. Images used and results of the analysis using the CLASlite 3.3 software. View larger in new window/tab.
Overall accuracies of CLASlite results were very low: 13.9% in Petcacab and Caobas, 14.5% in Felipe Carrillo Puerto, and 19.1% in Noh Bec, the ejido with the most visible impacts of selective logging in the post-harvest image. Table 1 shows the adjusted confusion matrices for the 2001–2014 forest change maps in each ACA (i.e. unchanged forest cover or un-logged, deforested or disturbed forest). As expected, unlogged areas were the most accurately predicted (14 to 16%) with producer accuracies over 99%. However, over 68% of the observed disturbed areas were mis-classified as unlogged pixels in all ejidos. Producer accuracies for classifying deforested areas from building logging roads and log landings and disturbed areas from felling and skidding were practically null in all ejidos (<0.3%) except for Noh Bec where producer accuracies were 1% for disturbed and 3% for deforested areas, showing very little effectiveness of CLASlite in detecting selective logging forest impacts in the Selva Maya of the Yucatan Peninsula.
| Table 1. Adjusted confusion matrices of CLASlite 3.3 results for each ejido ACA. | |||||||||||||
| Caobas | Petcacab | Felipe Carrillo Puerto | Noh Bec | ||||||||||
| Observed | |||||||||||||
| Predicted | Dist | Def | Unlog | Dist | Def | Unlog | Dist | Def | Unlog | Dist | Def | Unlog | |
| Dist | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.02 | 0.00 | |
| Def | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.02 | 0.00 | |
| Unlog | 0.69 | 0.17 | 0.14 | 0.68 | 0.18 | 0.14 | 0.70 | 0.16 | 0.14 | 0.75 | 0.03 | 0.16 | |
| Def = Deforestation; Dist = Degradation; Unlog = Unlogged | |||||||||||||
4 Discussion
Our results show that even with high logging intensities and in large-scale community forest management operations in the Selva Maya, CLASlite could not accurately detect forest disturbance from timber harvesting using Landsat images (30 m spatial resolution). In contrast, the CLAS algorithms worked well in detecting forest degradation from logging in other countries of the tropics (for example, Belize, Madagascar, Malaysia and Brazil). However, in Madagascar (Allnutt et al. 2013) and Belize (Chicas et al. 2016), the authors did not distinguish selective logging from other disturbance sources, including slash and burn cultivation and road construction. In other studies where degradation caused from selective logging was identified and mapped, logging intensities were much higher, such as in Malaysia (50 to 150 m3 ha–1: Bryan et al. 2013) and Brazil (23 m3 ha–1: Asner et al. 2005; Asner 2009); whereas in our study site, the ejidos with the highest logging intensities, Nohbec and Petcacab, were only 7 and 5 m3 ha–1 respectively. Thus, the use of CLASlite by forest managers and conservation organizations to monitor degradation by selective logging on the Yucatan Peninsula would not be feasible in this region with very low logging intensities (Ellis et al. 2019).
Even though, CLASlite could conceivable detect forest disturbance at resolution of 0.1 ha (1000 m2) (Asner et al. 2010; Asner 2014), forest impacts from felling gaps (100 to 500 m2) or skid trails (4 or 5 m wide) in the Selva Maya were not large enough to be detected by CLASlite with Landsat imagery. Even larger deforestation impacts, logging yards (approximately 1000 m2) and recently constructed logging roads, were very poorly detected by CLASlite. Besides very low logging intensities in the Selva Maya, ejidos tend to utilize and maintain old logging roads, minimizing forest impacts from new roads. Moreover, they conduct improved management practices such as directional felling and use of modified agricultural tractor that also reduce biomass impacts (Ellis et al. 2019). The rapid recovery of photosynthetic vegetation after logging in the region (Martínez and García 2007; Toledo 2009) may further complicate monitoring selective logging disturbance using Landsat images (Broadbent et al. 2006) with the CLASlite monitoring system. Impacts from selective logging of up to 400 to 600 m2 have been detected with Landsat images in several remote sensing studies (Asner et al. 2005; Tritsch et al. 2016; Vogelmann et al. 2017) and higher accuracies in detecting forest disturbance from selective logging in the same study area have been obtained using vegetation indices such as NDVI and Tasseled Cap. However, the automated CLASlite system oriented towards forest managers and conservation practitioners with little remote sensing experience is not sufficiently accurate for detecting selective logging disturbance.
The only study that applied CLASlite and Landsat images to measure forest degradation on the Yucatan Peninsula was conducted in the state of Yucatan in agricultural areas with slash and burn cultivation where the results of fractional and forest cover maps were used to model biomass changes at regional scale (30 by 40 km) (Romero-Sanchez and Ponce-Hernandez 2017). The study of Romero-Sanchez and Ponce-Hernandez (2017) focuses on evaluating temporal biomass changes as a proxy for degradation, evaluating for the most part disturbances from forest clearings typically larger than 1000 m2. These clearings are cultivated for 2 to 3 years and then left to fallow for different periods until the cycle repeats, requiring denser time series to detect forest biomass dynamics and potential degradation. In comparison, we evaluate disturbance from selective logging which occurs at a much smaller scale, longer rotations and does not involve a change in forest cover. We therefore recommend CLASlite as tool to detect and monitor forest impacts greater than 900 m2 resulting from other disturbances, for example, slash and burn agriculture, pasture establishment or fire.
References
Allnutt T., Asner G., Golden C., Powell G. (2013). Mapping recent deforestation and forest disturbance in northeastern Madagascar. Tropical Conservation Science 6(1): 1–15. https://doi.org/10.1177/194008291300600101.
Anwar S., Stein A. (2012). Detection and spatial analysis of selective logging with geometrically corrected Landsat images. International Journal Of Remote Sensing 33(24): 7820–7843. https://doi.org/10.1080/01431161.2012.701378.
Asner G.P. (2009). Automated mapping of tropical deforestation and forest degradation: CLASlite. Journal of Applied Remote Sensing 3(1) article 033543. https://doi.org/10.1117/1.3223675.
Asner G.P. (2014). Satellites and psychology for improved forest monitoring. Proceedings of the National Academy of Sciences 111(2): 567–568. https://doi.org/10.1073/pnas.1322557111.
Asner G.P., Knapp D.E., Broadbent E.N., Oliveira P.J.C., Keller M., Silva J.N. (2005). Selective logging in the Brazilian Amazon. Science 310(5747): 480–482. https://doi.org/10.1126/science.1118051.
Asner G.P., Powell G.V.N., Mascaro J., Knapp D.E., Clark J.K., Jacobson J., Hughes R.F. (2010). High-resolution forest carbon stocks and emissions in the Amazon. Proceedings of the National Academy of Sciences 107(38): 16738–16742. https://doi.org/10.1073/pnas.1004875107.
Baccini A., Walker W., Carvalho L., Farina M., Sulla-Menashe D., Houghton R. (2017). Tropical forests are a net carbon source based on aboveground measurements of gain and loss. Science 358(6360): 230–234. https://doi.org/10.1126/science.aam5962.
Broadbent E., Zarin D., Asner G., Peña-Claros M., Cooper A., Littell R. (2006). Recovery of forest structure and spectral properties after selective logging in lowland Bolivia. Ecological Applications 16(3): 1148–1163. https://doi.org/10.1890/1051-0761(2006)016[1148:ROFSAS]2.0.CO;2.
Bryan J., Shearman P., Asner G., Knapp D., Aoro G., Lokes B. (2013). Extreme differences in forest degradation in Borneo: comparing practices in Sarawak, Sabah, and Brunei. PLoS ONE 8(7) article e69679. https://doi.org/10.1371/journal.pone.0069679.
Chicas S., Omine K., Saqui P. (2016). CLASlite algorithms and social surveys to asses and identify deforestation and forest degradation in Toledo’s protected areas and forest ecosystems, Belize. Applied Geography 75: 144–155. https://doi.org/10.1016/j.apgeog.2016.08.012.
Ellis E., Porter-Bolland L. (2008). Is community-based forest management more effective than protected areas? A comparison of land use/land cover change in two neighboring study areas of the Central Yucatan Peninsula, Mexico. Forest Ecology and Management 256(11): 1971–1983. https://doi.org/10.1016/j.foreco.2008.07.036.
Ellis E., Kainer K., Sierra-Huelsz J., Negreros-Castillo P., Rodriguez-Ward D., DiGiano M. (2015). Endurance and adaptation of community forest management in Quintana Roo, Mexico. Forests 6(11): 4295–4327. https://doi.org/10.3390/f6114295.
Ellis E., Romero-Montero J., Hernández-Gómez I. (2017). Deforestation processes in the state of Quintana Roo, Mexico. Tropical Conservation Science 10: 1–12. https://doi.org/10.1177/1940082917697259.
Ellis E., Armenta-Montero S., Hernández-Gómez I.U., Romero-Montero J.A., Ellis P.W., Rodríguez-Ward D., Blanco-Reyes P., Putz F.E. (2019). Reduced-impact logging practices reduce forest disturbance and carbon emissions in community managed forests on the Yucatán Peninsula, Mexico. Forest Ecology and Management 437: 396–410. https://doi.org/10.1016/j.foreco.2019.01.040.
Flores J., Espejel I. (1994). Tipos de vegetación de la Península de Yucatán. Etnoflora Yucatanense, Fascículo 3. Universidad Autónoma de Yucatán, Mérida.
Griscom B., Ganz D., Virgilio N., Price F., Hayward J., Corez R., Dodge G., Hurd J., Lowenstein F.L., Stanley B. (2009). The hidden frontier of forest degradation. A review of the science, policy and practice of reducing degradation emissions. The Nature Conservancy, Arlington, VA. 76 p. https://www.conservationgateway.org/Files/Pages/hidden-frontier-forest-de.aspx.
Hansen C., Potapov P.V., Moore R., Hancher M., Turubanova S.A., Tyukavina A., Townshend R.G. (2014). High-resolution global maps of 21st-century forestcover change. Science 342(6160): 850–853. https://doi.org/10.1126/science.1244693.
Hernández-Gómez I., Cerdan-Cabrera R., Navarro-Martínez A., Vazquez-Luna D., Ellis E. Mapping disturbance from selective logging in community forests on the Yucatan Peninsula using LANDSAT 8 OLI imagery. Manuscript.
Martínez-Ramos M., García-Orth X. (2007). Sucesión ecológica y restauración: el caso de selvas húmedas. Boletín de la Sociedad Botánica de México 80(supl.): 69–84. https://doi.org/10.17129/botsci.1758.
Mas J., Pérez-Vega A., Ghilardi A., Martínez S., Loya-Carrillo J., Vega E. (2014). A suite of tools for assessing thematic map accuracy. Geography Journal 2014 article 372349. https://doi.org/10.1155/2014/372349.
Mas J., Lemoine-Rodríguez R., González R., López Sánchez J., Piña Garduño A., Herrera-Flores E. (2017). Evaluación de las tasas de deforestación en Michoacán a escala detallada mediante un método híbrido de clasificación de imágenes de percepción remota. Madera y Bosques 23(2): 119–131. https://doi.org/10.21829/myb.2017.2321472.
Olofsson P., Foody G., Stehman S., Woodcock C. (2013). Making better use of accuracy data in land change studies: estimating accuracy and area and quantifying uncertainty using stratified estimation. Remote Sensing of Environment 129: 122–131. https://doi.org/10.1016/j.rse.2012.10.031.
Olofsson P., Foody G., Herold M., Stehman S., Woodcock C., Wulder M. (2014). Good practices for estimating area and assessing accuracy of land change. Remote Sensing of Environment 148: 42–57. https://doi.org/10.1016/j.rse.2014.02.015.
Pearson T., Brown S, Murray L., Sidman G. (2017). Greenhouse gas emissions from tropical forest degradation: an underestimated source. Carbon Balance and Management 12(1):1–11. https://doi.org/10.1186/s13021-017-0072-2.
Putz F., Redford K. (2010). The importance of defining “forest”: tropical forest degradation, deforestation, long-term phase shifts, and further transitions. Biotropica 42(1): 10–20. https://doi.org/10.1111/j.1744-7429.2009.00567.x.
Putz F., Zuidema P., Pinard M., Boot R., Sayer J., Sheil D.,Vanclay J. (2008). Improved tropical forest management for carbon retention. PLoS Biology 6(7): 1368–1369. https://doi.org/10.1371/journal.pbio.0060166.
Reimer F., Asner G., Joseph S. (2015). Advancing reference emission levels in subnational and national REDD+ initiatives: a CLASlite approach. Carbon Balance and Management 10(1): 1–11. https://doi.org/10.1186/s13021-015-0015-8.
Romero-Sanchez M., Ponce-Hernandez R. (2017). Assessing and monitoring forest degradation in a deciduous tropical forest in Mexico via remote sensing indicators. Forests 8(9) article 302. https://doi.org/10.3390/f8090302.
Sasaki N., Putz F. (2009). Critical need for new definitions of “forest” and “forest degradation” in global climate change agreements. Conservation Letters 2(5): 226–232. https://doi.org/10.1111/j.1755-263X.2009.00067.x.
Simula M., Mansur E. (2011). A global challenge needing local response. Unasylva 62(238): 3–7.
Thompson I., Guariguata M., Okabe K., Bahamondez C., Nasi R., Heymell V., Sabogal C. (2013). An operational framework for defining and monitoring forest degradation. Ecology and Society 18(2) article 20. https://doi.org/10.5751/ES-05443-180220.
Tritsch I., Sist P., Narvaes I., Mazzei L., Blanc L., Bourgoin C. (2016). Multiple patterns of forest disturbance and logging shape forest landscapes in Paragominas, Brazil. Forests 7(12) article 315. https://doi.org/10.3390/f7120315.
Toledo-Aceves T., Purata-Velarde S., Peters C. (2009). Regeneration of commercial tree species in a logged forest in the Selva Maya, Mexico. Forest Ecology Management 258: 2481–2489. https://doi.org/10.1016/j.foreco.2009.08.033.
Vogelmann J., Khoa P., Lan D., Shermeyer J., Shi H., Wimberly M. (2017). Assessment of forest degradation in Vietnam using Landsat time series data. Forests 8(7) article 238. https://doi.org/10.3390/f8070238.
Zhu Z., Woodcock C., Olofsson P. (2012). Continuous monitoring of forest disturbance using all available Landsat imagery. Remote Sensing Of Environment 122: 75–91. https://doi.org/10.1016/j.rse.2011.10.030.
Total of 35 references.
