Jussi Manner  ,
Olle Gelin,
Anders Mörk,
Martin Englund
,
Olle Gelin,
Anders Mörk,
Martin Englund
Forwarder crane’s boom tip control system and beginner-level operators
Manner J., Gelin O., Mörk A., Englund M. (2017). Forwarder crane’s boom tip control system and beginner-level operators. Silva Fennica vol. 51 no. 2 article id 1717. https://doi.org/10.14214/sf.1717
Highlights
- Boom tip control (BTC) allows the operator to control boom tip movements directly, instead of controlling each movement separately to achieve the desired boom tip movement
- BTC eased boom control, so beginner-level operators using BTC achieved higher productivity than beginner-level operators using a conventional (reference) system
- There were no significant differences in the slopes of learning curves between the systems.
Abstract
The forwarder loads processed wood and transports it to a landing. Productivity of forwarding could be improved by increasing driving speed, but difficult forest terrain limits this. According to current literature, crane work is the most time-consuming work element of forwarding, so improving crane work productivity is essential for improving forwarding productivity. One way to do this is through automation of recurrent boom movement patterns, or alternatively automation can be used to ease crane work. When using conventional boom control (CBC), the operator manually controls each of the independent boom joint movements and combines them to achieve a desired boom tip movement, but boom tip control (BTC) allows the operator to control boom tip movements directly. The objective of the present study was to examine whether BTC facilitates crane work and affects the slopes of learning curves for beginner-level forwarder operators. The study was carried out using a standardised test routine to evaluate effects of two fixed factors, system (levels: CBC, BTC) and point of time (four levels), on five dependent variables. Four of the five dependent variables measured ease of boom control and the fifth measured crane work productivity. The results showed that there were no significant differences in the slopes of learning curves between the systems but the BTC did increase crane work productivity and made boom control easier.
Keywords
productivity;
automation;
cut-to-length logging;
haulage;
crane work;
extraction;
learning curve
-
Manner,
The Forestry Research Institute of Sweden (Skogforsk), Uppsala Science Park, SE-751 83 Uppsala, Sweden
 http://orcid.org/0000-0002-4982-3855
E-mail
jussi.manner@skogforsk.se
http://orcid.org/0000-0002-4982-3855
E-mail
jussi.manner@skogforsk.se
- Gelin, The Forestry Research Institute of Sweden (Skogforsk), Uppsala Science Park, SE-751 83 Uppsala, Sweden E-mail olle.gelin@skogforsk.se
- Mörk, The Forestry Research Institute of Sweden (Skogforsk), Uppsala Science Park, SE-751 83 Uppsala, Sweden E-mail anders.mork@skogforsk.se
- Englund, The Forestry Research Institute of Sweden (Skogforsk), Uppsala Science Park, SE-751 83 Uppsala, Sweden E-mail martin.englund@skogforsk.se
Received 18 October 2016 Accepted 28 February 2017 Published 6 March 2017
Views 80309
Available at https://doi.org/10.14214/sf.1717 | Download PDF

1 Introduction
Fully mechanized cut-to-length logging system consists of harvester and forwarder. A harvester cuts and limbs the trees, crosscuts the stems into different assortment (logs). A forwarder picks up the logs, places them in its load-space and extracts them to a roadside landing.
Thus, a forwarder is a log-loading terrain transport machine. Generally, the crane work is the most time-consuming work element (Kellogg and Bettinger 1994; Nurminen et al. 2006; Manner et al. 2016b). Though, relative time consumption distribution between the work elements depends on extraction distance, assortment-specific log concentrations (expressed e.g. m3 (100 m)–1), and the assortment loaded in each load (Manner et al. 2013). Moreover, for instance use of bogie tracks can increase productivity through improved load bearing capacity (Edlund et al. 2013). Nevertheless, driving speeds are largely restricted by forest terrain, so improving the efficiency of crane operations is essential for improving forwarder productivity.
Automation may improve crane work productivity, and recurrent boom movement patterns can be fully or partly automated (e.g. Cranab AB 2013; Westerberg 2014). Instead of automating complete boom cycles, parts of crane cycles or certain movement patterns can be automated to facilitate manual crane work. Conventionally, the operator manually controls each independent boom joint movement and combines them to achieve a desired boom tip movement. Automation allows the operator to control boom tip movements directly.
Knuckleboom cranes, used on forwarders, consist of a system of hydraulic cylinders and mechanical levers (Gerasimov and Siounev 1998, 2000; Manner et al. 2016a). Loads are lifted and lowered mainly by pivoting the first boom, and to a lesser degree by pivoting the second boom. An extension boom changes the horizontal distance between the boom tip and the crane pillar (i.e. moves the boom tip horizontally towards or away from the crane pillar).
In 2013, John Deere Forestry Oy introduced its own version of a boom tip control system, called Intelligent Boom Control, IBC, (John Deere 2013). IBC is now offered as an option on all John Deere forwarders, but the development of boom tip control began as early as the 1980s (e.g. Löfgren 1989; Löfgren et al. 1994; Löfgren and Wikander 2009). IBC is claimed to increase productivity and accelerate learning curves for beginner-level operators (John Deere 2013).
A learning curve, a relationship between productivity and experience, describes learning outcome, i.e. productivity increment through learning over time. Accelerating learning curves of operators is of research interest because it has a direct impact on the machine contractor’s turnover (Björheden 2000; Purfürst 2010). However, “learning curve” must be interpreted with caution. For example, two compared systems may have parallel learning curves but completely different productivity levels, if the first system is almost completely automated (i.e. little to be gained from learning) and the second system is too complex to be learned in an appropriate time interval (i.e. delayed learning). Both systems generate similar, nearly flat, learning curves but the automated system may have higher productivity. Purfürst (2010) also found that shapes of learning curves vary between operators, making interpretation difficult.
The objective of this study was to examine whether IBC facilitates crane work, increases productivity, and accelerates learning curves for beginner-level operators.
2 Material and methods
The experiment was carried out in Sweden in autumn 2014, using a large IBC-forwarder (John Deere 1510E, payload 15 000 kg). The machine was equipped with a rotating and levelling cabin, a CF710S crane (reach 10 m, slewing torque 32 kNm, gross lifting torque 135 kNm), a Hultdins SG 360 grapple (grapple area 0.36 m2), and a standard load-space.
The machine had the standard crane controls, consisting of two joysticks, each with a rocker switch. When the IBC is switched off, the boom control system functions as a conventional boom control (CBC). The left joystick’s right-left actuation slews the crane pillar (i.e. turns the crane) and back-forth actuation pivots the second boom, while the left rocker switch controls extension boom length. The right joystick’s back-forth actuation lifts-lowers the first boom and right-left actuation controls the rotator, while the right rocker switch opens-closes the grapple.
In both IBC and CBC, the left joystick slews the crane pillar, the right joystick controls the rotator, and the right rocker switch opens-closes the grapple. However, the principles of boom control in the two systems are completely different. In IBC, the left joystick’s back-forth actuation controls the horizontal distance between the boom tip and the crane pillar (i.e. moves the boom tip horizontally towards or away from the crane pillar) while the right joystick’s back-forth actuation controls the boom tip’s vertical position (i.e. height). The novelty is that the joysticks’ back-forth actuations no longer correspond to one specific crane joint but, instead, steer the boom tip directly to the desired direction. This is because the IBC automatically combines the first-, second- and extension boom movements to achieve a desired vertical and horizontal boom tip movement. The left rocker switch is not used in IBC.
When the forwarder’s IBC system is switched off, the boom control system (hereafter “system”) functions as a CBC, providing a reference system for comparing ease of boom control and crane work productivity.
2.1 Test and measurement procedure
The experiment was carried out using a standardised procedure. Seventeen students, in the age range of 16–17 years (15 males, two females), took part in the experiment; they had no previous experience of forwarding and had just begun a three-year vocational programme to become forest machine operators. Of the 17 students, nine were randomly assigned to use CBC throughout the experiment and eight to use IBC. The option to switch system between IBC and CBC enabled system comparisons.
The students followed a set of instructions, and the tasks were observed. A student repeatedly placed two logs (blue and red) to predetermined positions in the load-space and on the ground, then completed tasks 1–8 (listed in Table 1), a total of four times (Table 1, Fig. 1). After data collection, task 8 was removed from the dataset, and excluded from the study (Table 1). One complete observation consisted of 28 tasks in total (4 × 7 tasks, Table 1), with one exception where the number of tasks was reduced from 28 to 16 (explained later). The same two logs were used throughout the experiment – approximately 430 cm long, with root and top diameters of 20 and 23 cm, respectively.
| Table 1. During a complete test procedure, i.e. observation, each of tasks 1–8 were repeated four times in the order shown. Only the first two of four identical repetitions (rep.), i.e. the first half of complete test procedures, are shown below. Task numbers 8 were later removed from the dataset. Consequently, four repetitions of task numbers 1–7 constituted one complete observation for statistical analyses. In column ‘Act’, ‘Incl.’ = task included in the study, ‘Excl.’ = task completely excluded from the study. | |||
| Task | Description | Act | Rep. |
| 1 | Red log lifted from the ground and placed in the load-space. | Incl. | 1 |
| 2 | Boom steered from the load-space, without holding any log in the grapple, to the blue log on the ground. | Incl.1 | |
| 3 | Blue log lifted from the ground and placed in the load-space. | Incl. | |
| 4 | Boom steered from the blue log – within the load-space, and without holding any log in the grapple – to the red log. | Incl.1 | |
| 5 | Red log lifted from the load-space and placed on the ground. | Incl. | |
| 6 | Boom steered from the ground, without holding any log in the grapple, to the blue log in the load-space. | Incl.1 | |
| 7 | Blue log lifted from the load-space and placed on the ground. | Incl. | |
| 8 | Boom returned, without holding any log in the grapple, back to the red log, i.e. starting position. | Excl. | |
| 1 | Red log lifted from the ground and placed in the load-space. | Incl. | 2 |
| 2 | Boom steered from the load-space, without holding any log in the grapple, to the blue log on the ground. | Incl.1 | |
| 3 | Blue log lifted from the ground and placed in the load-space. | Incl. | |
| 4 | Boom steered from the blue log – within the load-space, and without holding any log in the grapple – to the red log. | Incl.1 | |
| 5 | Red log lifted from the load-space and placed on the ground. | Incl. | |
| 6 | Boom steered from the ground, without holding any log in the grapple, to the blue log in the load-space. | Incl.1 | |
| 7 | Blue log lifted from the load-space and placed on the ground. | Incl. | |
| 8 | Boom returned, without log held in the grapple, back to the red log, i.e. starting position. | Excl. | |
| Etc. | … | … | … |
| 1 Exception: tasks 2, 4, 6 were excluded from the dependent variable clearance. For more information, see Fig. 1, Panel: B. | |||
For each student, five dependent variables were recorded for four points of time, at four-week intervals:
1) Total time consumption for a complete observation [seconds] (“total time”).
2) Total distance travelled by a boom tip during one complete observation [metres] (“total distance”).
3) Average number of simultaneous joystick functions in use during one complete observation (“simultaneous functions”). All joystick functions, including joystick movements and rocker switches, were recorded.
4) Average maximum vertical clearances between the top of the bunk stake and the lowest point of grapple [metres] (“clearance”). Clearance was recorded only for the tasks where a log was lifted over the stakes. Clearance is therefore the exception where one complete observation comprised only 16 tasks (4 × 4 tasks, Table 1).
5) Total number of directional changes of joystick during a complete observation (“directional changes”). The number of directional changes of the joystick must not be confused with those of the boom. A joystick actuation to decelerate actual boom movement is regarded as a directional change, regardless of whether the boom’s direction of motion changes or not. However, a joystick actuation to accelerate actual boom movement is not regarded as a directional change.
Variable 1 measured crane work productivity. The students were to complete all tasks in the shortest possible time. Variables 2–5 measured ease of boom control, and students were given no direct instruction. These were complementary variables to improve understanding of any differences found in variable 1.
All hydraulic cylinders in IBC-cranes are sensorized. This sensor data, together with crane geometry, enables mathematical reconstruction of boom-tip paths. Raw data from the sensors was accessed using John Deere’s standard on-board data system (TimberLink, John Deere Forestry Oy, Finland). The entire experiment was filmed and the observations of total time were measured through videogrammetry, using Vegas Pro 13 Edit software (Sony Corporation). The precision of the measurements was 0.1 seconds, i.e. ten measurements per second, both for automatically and manually collected data. Time consumption was measured in productive machine time, with all delays excluded (IUFRO… 1995).
Operators can normally adjust the boom speed and acceleration of forwarder cranes, according to personal preference. However, in this study, standard settings were used for both boom speed and acceleration to prevent individual operator settings confounding treatment effects. Consequently, maximum boom speed or acceleration was the same, regardless of system or point of time. The most appropriate boom speed and acceleration settings were determined by an experienced impartial forwarding instructor.
Machine vibrations may cause involuntary joystick actuation. For the simultaneous functions and the directional changes (dependent variables 3 and 5), joystick actuation was considered as involuntary if the movement was less than 5% of the difference between the neutral and extreme positions. This also applied for the rocker switches. The threshold of five percent was determined through ocular inspections of data records.
2.2 Statistical analysis
Single tasks and repetitions were not analysed separately, but the unit of observation in statistical analyses was one complete test procedure comprising 16 or 28 tasks (Table 1, Fig. 1).
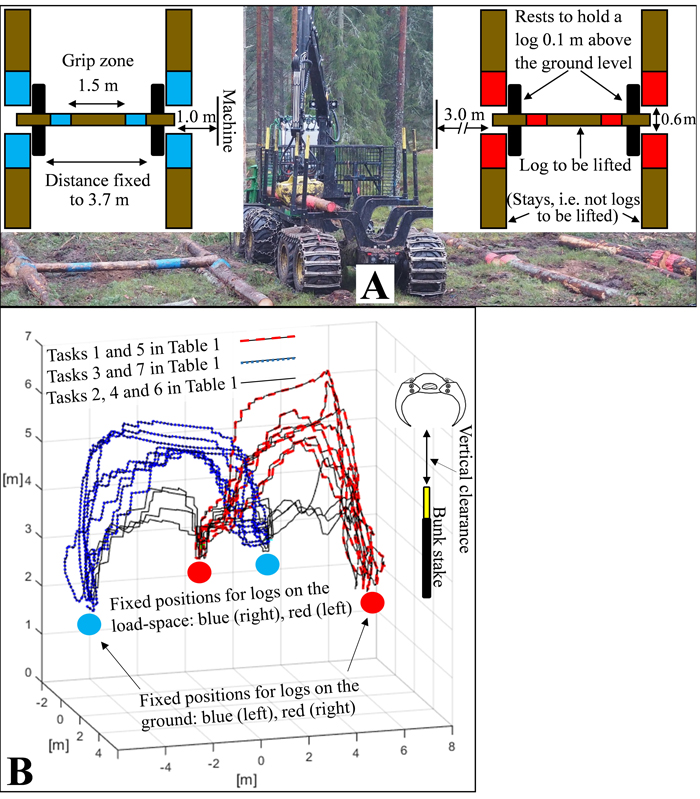
Fig. 1. Panel A. Test procedure comprised fixed positions for logs (blue and red), both in the load-space and on the ground. During a complete observation, the logs were repositioned in a predetermined way several times (Table 1). Panel B. Boom-tip paths were mathematically reconstructed later, based on the crane geometry and collected raw data. A visualised reconstruction example here represents one complete observation.
Two-way analysis of variance (ANOVA) was used to evaluate effects of two fixed factors, system and point of time, on five dependent variables: 1) total time, 2) total distance, 3) simultaneous functions, 4) clearance, and 5) directional changes. The system had two levels, CBC and IBC, while point of time had four levels, 1, 2, 3 and 4. This gave eight treatments per dependent variable. Each of the five (full factorial) ANOVA models also contained an interaction effect between the factors. All observations from individual students were pooled within the treatment and treated as independent observations, so the students were not analysed individually. Each of eight treatments was planned to be repeated nine times on CBC and eight times on IBC but, due to dropouts, eight students used CBC and six used IBC. Sample sizes were therefore slightly unequal, i.e. eight CBC and six IBC observations per treatment.
A general linear model (GLM) was used for analysing the ANOVA models (Enterprise Guide 6.1, SAS Institute Inc.). During the GLM procedure, pairwise differences were analysed with Tukey’s simultaneous test of means to display chronological trends in the dependent variables and to compare the systems. Grouping information between singular means is not shown. The normality assumptions were satisfied with ocular inspections of residual plots, and the data was not transformed. Dispersion was measured as standard deviation (SD) and the critical level of significance was set to 5%.
3 Results
Both studied factors, system (CBC, IBC) and point of time (1, 2, 3, 4), significantly affected the dependent variables total time and directional changes. Means in the dependent variables decreased with increasing point of time (Fig. 2: panels A, E). Total time for the CBC was, on average, 26.4% longer than that of the IBC, while the corresponding difference for directional changes was 39.5% (ANOVA, n = 56, p < 0.001). Variations in dependent variables, total time and directional changes, were equally explained by the two factors. In contrast, the dependent variable total distance was significantly affected only by the system, while the (fixed) effect of point of time, as well as the interaction effect, fell just outside the set level for significance (0.071 ≤ p≤ 0.074, data not shown). The total distance of CBC was, on average, 6.1% longer than that of the IBC.
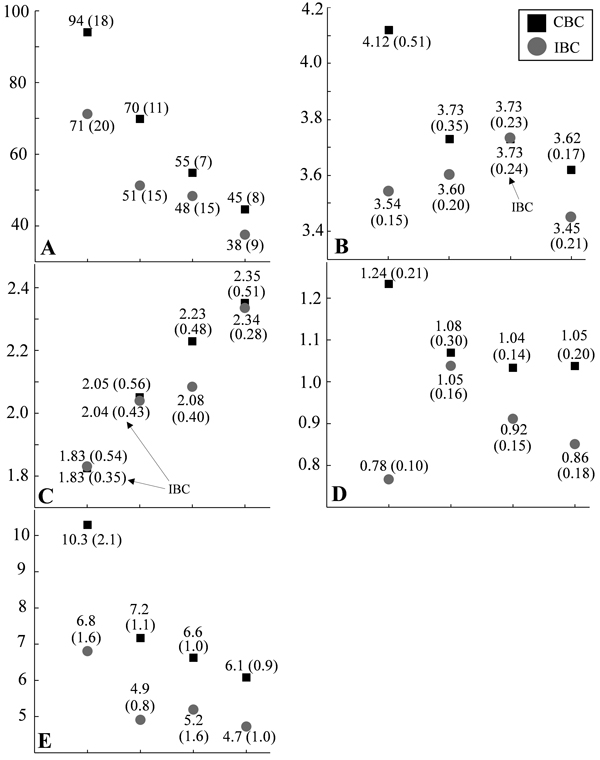
Fig. 2. In all panels: black squares correspond to the conventional boom control (CBC) and grey balls to the Intelligent Boom Control (IBC); standard deviations are given in parentheses after the means; ticks on x axes correspond to the given point of time 1, 2, 3 and 4. Panel A, y axis: total time per complete observation [10 seconds]. Panel B, y axis: total distance travelled by boom tip [100 metres]. Panel C, y axis: average number of simultaneous functions of the joystick in use during a complete observation. Panel D, y axis: vertical clearance [m] between the top of the bunk stake and the lowest point of grapple. Panel E, y axis: number of directional changes of the joystick [×1000]. More detailed descriptions of the depended variables are given in Section 2.1. Note that the ranges on the y axes also vary in relative terms.
Simultaneous functions increased significantly, showing a trend with an increasing point of time, while system had no significant effect (Fig. 2: panel C, ANOVA). In contrast, clearance was only affected by the system, while point of time had no fixed effect. Clearance was, on average, 22.4% greater for the CBC than the IBC (ANOVA, n = 56, p < 0.001). However, the effects of system varied between the point of time levels, causing a significant interaction effect (Fig. 2: panel D, no complete data shown).
Dispersion in terms of SD/mean was modest (Fig. 2), varying from 4.3% (total distance, IBC, point of time 1) to 31.6% (total time, IBC, point of time 3) (Fig. 2: panels B, A). SD in total time showed a decreasing trend, with increasing point of time for both systems (Fig. 2: panel A). Similarly, dispersion in the CBC’s total distance and directional changes decreased as a trend with increasing point of time (Fig. 2: panels B, E). For the remaining dependent variables, no chronological trend of increasing or decreasing SD was evident (Fig. 2).
Except in the case of clearance, there were no statistically significant interactions between the factors, so system did not affect the slopes of the learning curves. For clearance, the effects of point of time on CBC and IBC were approximately reversed (Fig. 2: panel D), but both point of time and system had a significant fixed effect on most of the dependent variables (Fig. 2, no complete data shown).
4 Discussion
In forestry, learning curves are traditionally analysed at operator level (Björheden 2001; Purfürst 2010; Aalmo and Talbot 2014), but here they were analysed in terms of system. This study is like studies in medicine and educational science, where the fundamental is that each individual is involved with only one of alternative cure or environments (Keselman et al. 2001; Singh et al. 2013; Pagels et al. 2014). In this study the system corresponds to a cure or environment. Involving each individual student with both systems, enabling operator to be entered as a factor in the statistical model, may have risked isolating the effects of system. Modest SDs in all time intervals indicated that point of time affected each student within the system in approximately the same way. This contradicts Purfürst’s (2010) finding that shapes of learning curves vary between operators.
The experimental design and setup strongly isolated fixed effects of the factors, but additional levels for point of time might have improved statistical power for detecting possible interaction effects. Ocular inspection suggests that interaction effects cannot be ruled out. For instance, differences in total time between systems became less as point of time increased, but statistical testing did not confirm this (Fig. 2: panel A). Additional points of time might have detected, or more unambiguously rejected, the existence of interaction effect (p = 0.071) in the case of total distance (Fig. 2: panel B). Despite insufficient points of time, the experiment can generally be considered successful. There were also some limitations generally relating to repeated measures, and which are practically unavoidable. Even if two student groups were randomly selected, initial skill levels of the groups may have differed. The school training was equal for all students throughout the study, irrespective of the system used, but training is difficult to control, especially the training that takes place outside the school. Finally, due to the generally modest variance, effects of the unequal sample sizes on the ANOVA results can be regarded as minor.
4.1 Conclusions
The results did not confirm the claim that the IBC would generate steeper learning curves. In fact, total time decreased (but not statistically significantly) more rapidly with increasing point of time for the CBC than for the IBC. However, this can partly be explained by high time consumption for CBC at the first points of time; reducing high time consumption is easier than reducing (already) low time consumption. Applying this interpretation, students using CBC gained more from learning than students using IBC, who were already sufficiently productive at the first point of time.
Total time was consistently lower for IBC, probably due to easier boom control. Considerable reduction in directional changes when using IBC not only suggests fewer intermittent joystick actuations but also reduced intermittent boom movements; this is shown in the shorter total distances for IBC (Fig. 2: panels E, B). Corresponding reductions in clearance could also have contributed to the IBC’s shorter total distance (Fig. 2: panel D). The IBC’s easier boom control therefore reduced its total distance, which in turn reduced total time. However, shorter total distance alone cannot explain the difference in total time; possible explanations are the IBC’s faster boom tip speed and less time spent manoeuvring the logs. These, inductively derived, explanations also suggest easier boom control with the IBC.
The results for the IBC are promising and this study should be supplemented with a long-term follow-up study involving professional machine operators. Such a study should include a comprehensive literature review on recent development of forestry cranes. The focus in this research note has been on experimental methodology and results.
Acknowledgements
This study was funded by Skogforsk. We thank students and staff of the upper-secondary school, Vretagymnasiet (Linköping, Sweden), for their collaboration.
References
Aalmo G.O., Talbot B. (2014). Operator performance improvement through training in a controlled cable yarding study. International Journal Forest Engineering 25(1): 5–13. https://doi.org/10.1080/14942119.2014.904150.
Björheden R. (2001). Learning curves in tree section hauling in central Sweden. International Journal of Forest Engineering 12(1): 9–18.
Cranab AB (2013). The first fully sensorized forwarder crane. Press Release.
Edlund J., Keramati E., Servin M. (2013). A long-tracked bogie design for forestry machines on soft and rough terrain. Journal of Terramechanics 50(2): 73–83. https://doi.org/10.1016/j.jterra.2013.02.001.
Gerasimov Y.Y., Siounev V.S. (1998). Forest machinery crane compound scheme synthesis:“Skeleton” part. Journal of Forest Engineering 9(1): 25–30.
Gerasimov Y.Y., Siounev V.S. (2000). Forest machinery crane compound scheme synthesis: Optimization of hydraulic cylinder operating mechanisms. Journal of Forest Engineering 11(1): 73–79.
IUFRO WP 3.04.02 (1995). Forest work study nomenclature. Test edition valid 1995–2000. Department of Operational Efficiency, the Swedish University of Agricultural Science.
John Deere (2013). News releases and information. https://www.deere.com/en_US/corporate/our_company/news_and_media/press_releases/2013/forestry/2013oct17_intelligent_boom_control.page. [Cited 31 July 2016].
Kellogg L.D., Bettinger P. (1994). Thinning productivity and cost for mechanized cut-to-length system in the Northwest Pacific coast region of the USA. Journal of Forest Engineering 5(2): 43–52. https://doi.org/10.1080/08435243.1994.10702659.
Keselman H.J., Algina J., Kowalchuk R.K. (2001). The analysis of repeated measures designs: a review. British Journal of Mathematical and Statistical Psychology 54(1): 1–20. https://doi.org/10.1348/000711001159357.
Löfgren B. (1989). Kranspetsstyrning. Skogforsk. Meddelande nr. 18. [In Swedish].
Löfgren B., Wikander J. (2009). Kinematic control of redundant knuckle booms. International Journal of Forest Engineering 20(1): 22–30.
Löfgren B., Attebrant M., Landström M., Nordén B., Petersson N.F. (1994). Kranspetsstyrning – en utvärdering. Skogforsk. Redogörelse nr 1. [In Swedish].
Manner J., Nordfjell T., Lindroos O. (2013). Effects of the number of assortments and log concentration on time consumption for forwarding. Silva Fennica 47(4) article 1030. https://doi.org/10.14214/sf.1030.
Manner J., Lindroos O., Arvidsson H., Nordfjell T. (2016a). Evaluation of a new energy recycling hydraulic lift cylinder for forwarders. Croatian Journal of Forest Engineering 37(2): 219–231.
Manner J., Palmroth L., Nordfjell T., Lindroos O. (2016b). Load level forwarding work element analysis based on automatic follow-up data. Silva Fennica 50(3) article 1546. https://doi.org/10.14214/sf.1546.
Nurminen T., Korpunen H., Uusitalo J. (2006). Time consumption analysis of the mechanized cut-to-length harvesting system. Silva Fennica 40(2): 335–363. https://doi.org/10.14214/sf.346.
Pagels P., Raustorp A., Ponce De Leon A., Mårtensson F., Kylin M., Boldemann C. (2014). A repeated measurement study investigating the impact of school outdoor environment upon physical activity across ages and seasons in Swedish second, fifth and eighth graders. BMC Public Health 14(803). https://doi.org/10.1186/1471-2458-14-803.
Purfürst F.T. (2010). Learning curves of harvester operators. Croatian Journal of Forest Engineering 31(2): 89–97.
Singh V., Rana R.K., Singhal R. (2013). Analysis of repeated measurement data in the clinical trials. Journal of Ayurveda and Integrative Medicine 4(2): 77–81. https://doi.org/10.4103/0975-9476.113872.
Westerberg S. (2014). Semi-automating forestry machines: motion planning, system integration, and human-machine interaction. Umeå University. Doctoral dissertation.
Total of 21 references.
